Check the video out following for a cheap to build capacity tester for 18650 Lithium Ion cells.
Check the video out following for a cheap to build capacity tester for 18650 Lithium Ion cells.
So as some of you may know, I have been in to electronics, mechanics and all things relating to robotics since an early age. My later life has taken me on some great adventures and I now have a wonderful family but this has also taken me away from where I started, where my roots are, the building, inventing, tinkering that is robotics.
So over the last couple of years I have been collecting parts, from bits out of skips to cheap parts off ebay and amazon, all gradually building up an idea in my mind as to how and what this robot will do and what it will look like, although the later i’m still not sure about.
So it started with some PTZ motors i got out a skip, thinking hmm these would make great super heavy duty servos , these are unstoppable by hand on even a 12 Volt supply and they are rated at 24 Volt. They also have built in limit switches and potentiometers, so coupled to an Arduino and a bit of code I now have one large, 2 degree of freedom servo, great stuff.

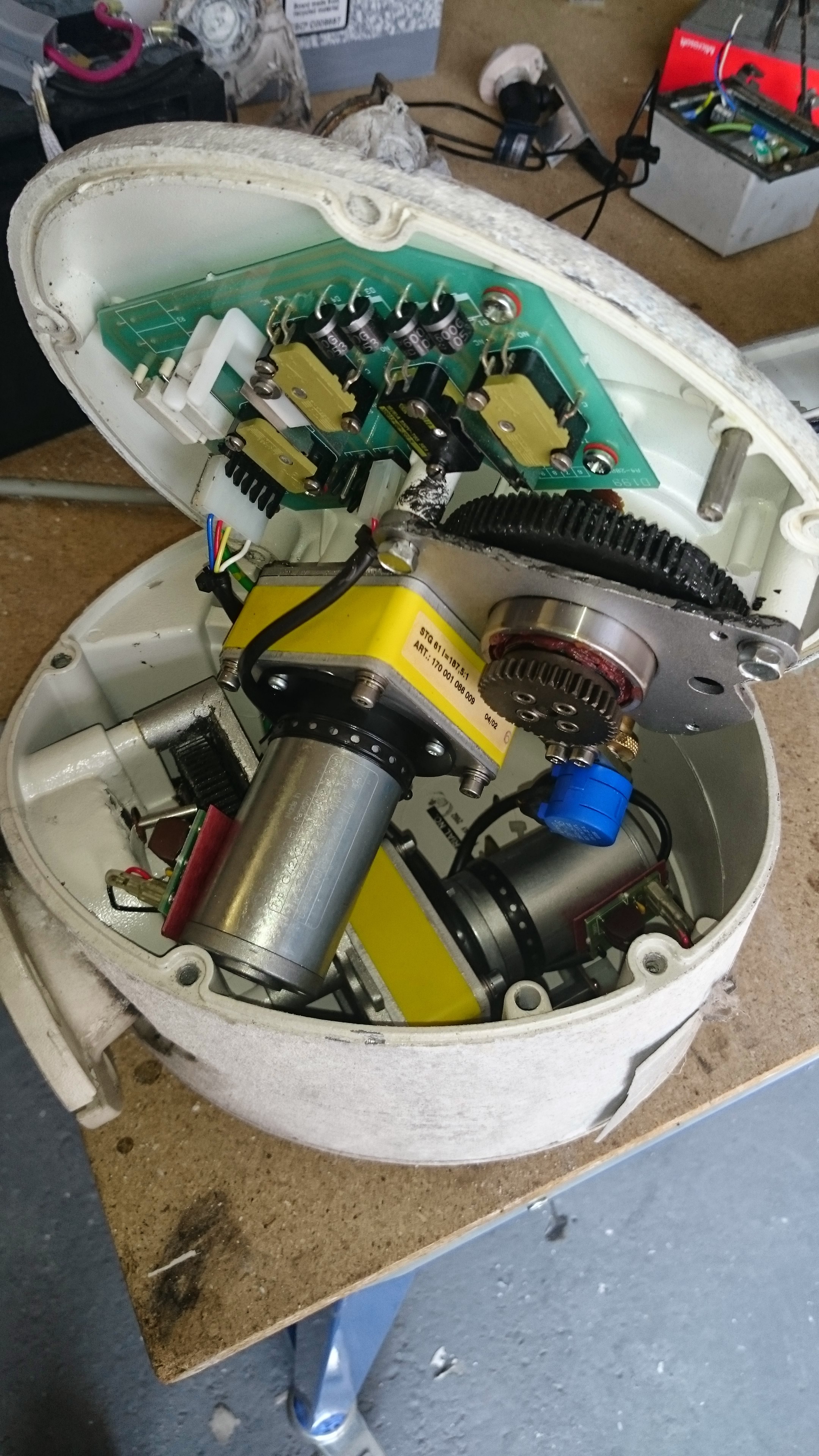
These PTZ housings are probably one the best scores I have ever had from a skip, although they were coated in a thick layer of aluminium oxide from having spent their life out side on the side of roads, damn you road gritters.
So next I needed something to drive this thing along. I thought long and hard, searched everywhere but still have never found a reliable solution at a low cost to make tank tracks, that’s what I would really like, by the way I get a kick out of recycling things, you might of guessed I don’t often pay for things when building robots. So tank tracks aside, everyone has started buying hover boards, although they don’t hover, they are a great source of large brushless motors, with no need for gearing and incredibly good power output to consumption, ebay it is, and a week or so later a box with 4 of then in arrives, quoted as being 500 Watts each, that will do the job!

Other bits collected, from skips, lithium battery packs from laptops and electric bicycles, check out the other blogs here to see about building up the battery packs for this project.
I was also able to score the below aluminum bars, which are great as they had loads of fitting attachments on them and makes things really easy to make, did I mention its aluminum and looks cool, lol.

anyways that’s all for now, part 2 will be soon.
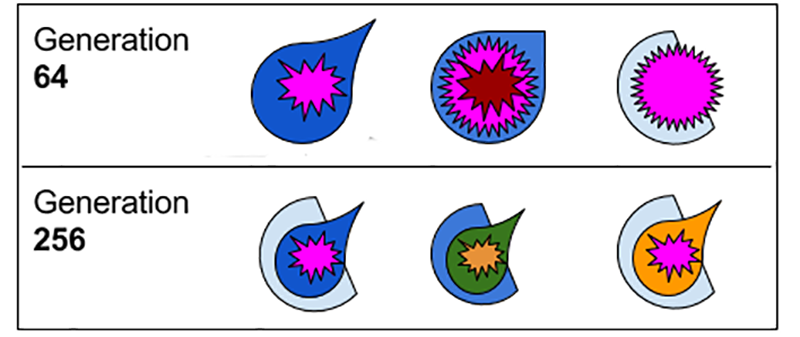
Evolution is a fact of life, it is the defining characteristic of life itself, but that doesn’t mean a stupid robot can’t evolve. For his entry into the Hackaday Pi Zero contest, diemastermonkey is doing just that: evolution for robots built around microcontrollers and a Raspberry Pi.
The project is a physical extension to genetic algorithms. Just like DNA and proteins have no idea what they’re actually doing, microcontrollers don’t either. Instead of randomly switching up base pairs and amino acids, his project makes random connections pins depending on the values of those pins.
The potential of these randomly programmed robots is only as good as the fitness function, and so far he has seen some surprising success. When putting these algorithms into a microcontroller connected to a tilting table mechanism and a PIR sensor, the robot eventually settled on a bit of code that would keep a ball in motion. You can check out the video of this below.