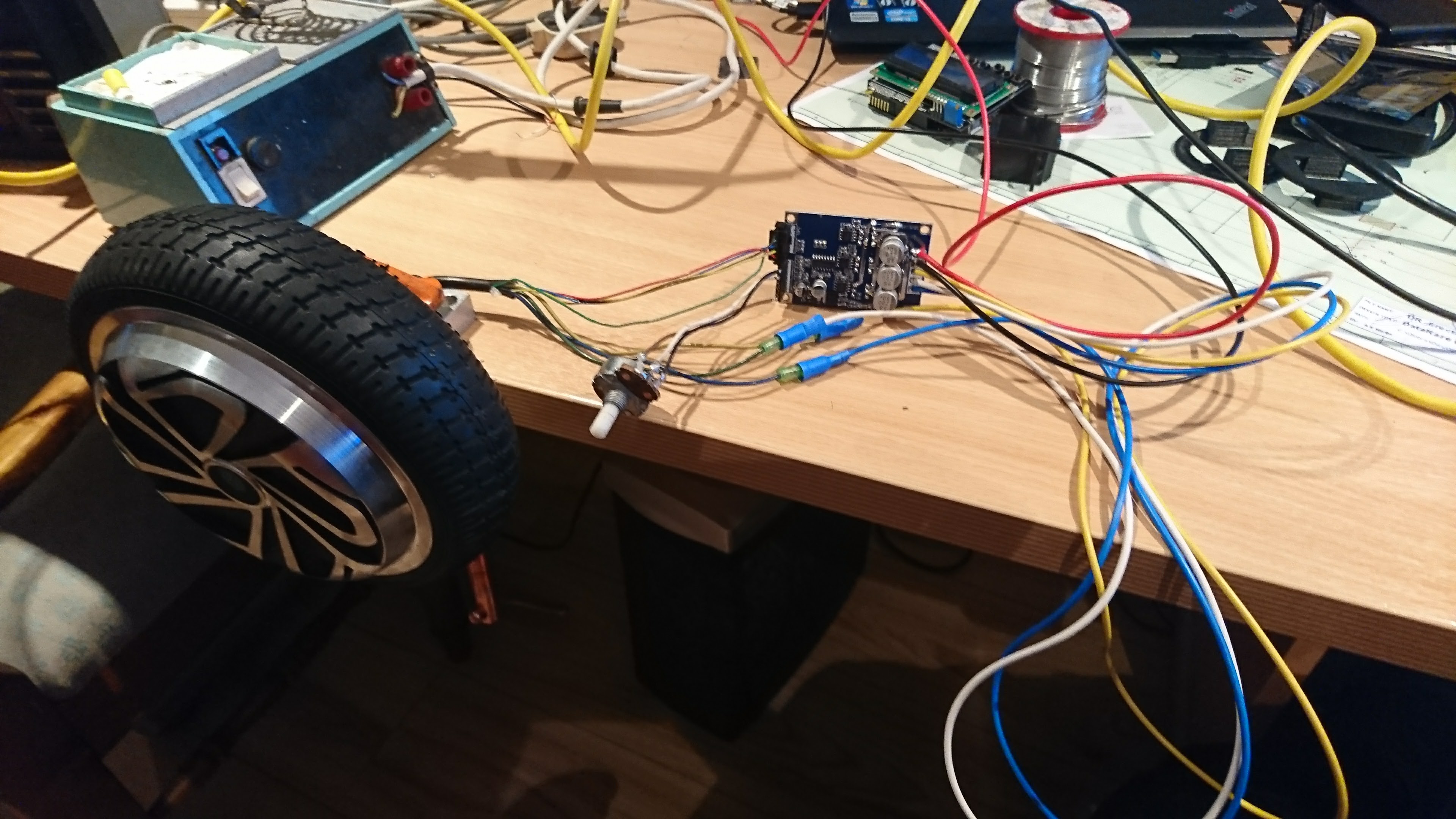
So I had sourced the relatively cheap motor / wheel assemblies from eBay, originally used for those hover boards. The next issue was controlling them, I could easily make my own controller but I would want it to look good so would want a professional PCB made, which is all fine, i’m a design engineer I can do all that, but the cost soon adds up. So off to eBay again, sorry, and I run across some controller boards that cost around £7 have a voltage of 12 to 36 Volts and are said to handle 500 Watts if you put a heatsink on them. So I order a couple, a few weeks pass and they arrive from China, in the typical way with very lacking documentation, well none in fact just a jiffy bag and the boards. So I look over some other suppliers of the same board and find the pin outs. So I have some pins I need to pull high / low to choose direction and enable the motor then I have a variable voltage input (0-5 Volts) for the speed. RC network to the rescue coupled with the PWM output on an Arduino, bingo variable voltage output from a Micro controller. There is also a pulse counter output, I have not played with this, but should be useful to give an indication as to how much the motor has moved.
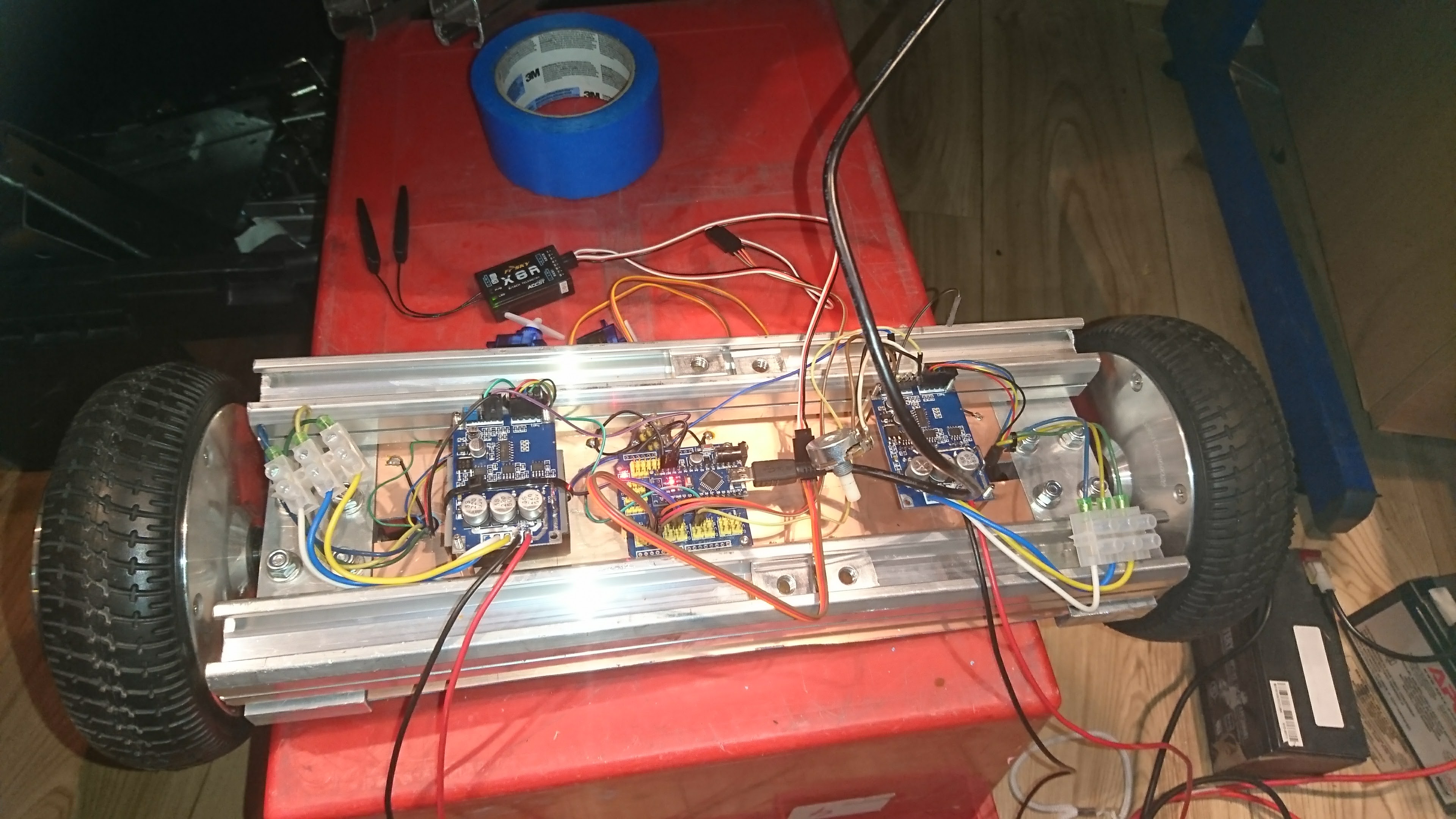
Motor Controllers Mounted
Anyways, I hookup one of the motors on the bench, start off with a pot to change the speed of the motor, all works great, nice and easy. so I start to mount all these bit up on some old copper clad board I had laying around, all the motor controls sit nicely in between the motors, Will clean up the wiring later. Next I start writing the Arduino code, start off simple and get one side working, first with a taranis remote control and then with serial data from a PC, no problem, then I pretty much copy the code I have written to control the extra motor controller. fire her up and one side works great the other side is anything but controlled, seemingly doing whatever it wants, strange, so double check wiring. All seems to be fine, start double checking code, all seems to be in order too. so I pull the motor controller board off and stick on a spare motor I have, it works as i expect, really strange, so I stick back in the robot, try again, its does not want to play, so with a bit of head scratching I think to myself its late will pick it up again tomorrow.
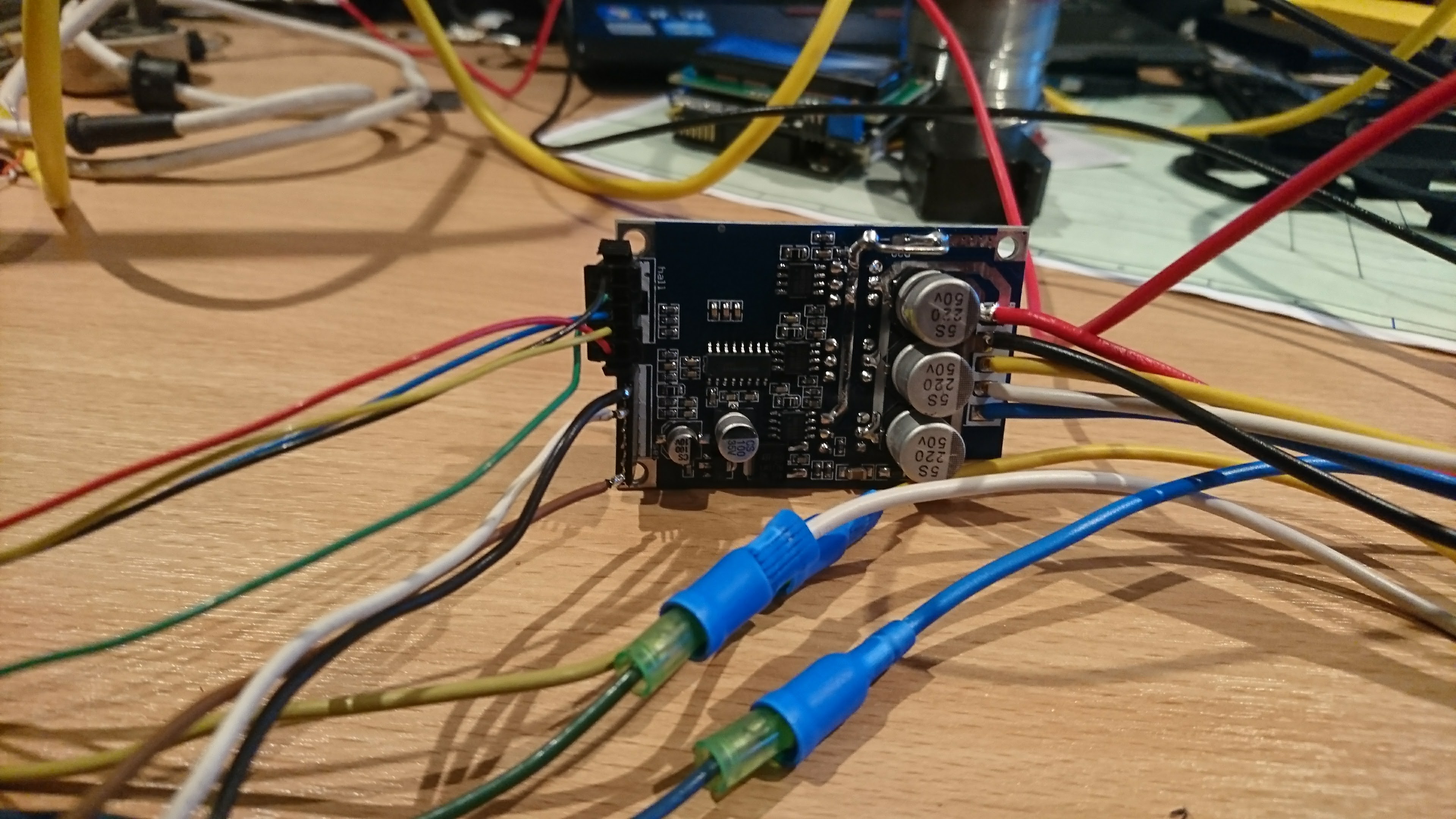
So next day I double check everything again, all in order, I even write some really simple code to make the other side work. But still no play. So I admit defeat I pull the controller out again and try it on the bench, oh I see now, wont work on the bench with the spare motor either now, so a little more messing and it seems it just likes to do random things, sometimes works sometimes doesn’t, maybe its got different firmware of maybe its just got hit by static, in any case I order two more of the controllers, which have arrived now, but I’ve not had time to fit on in. So I will post again about my adventures with these controllers, but at the moment its a 50/50 chance of the them working, I will give credit to one that does work though, its a great cheap large brushless motor controller when hooked up to the Arduino.
DC 12V-36V 500W Brushless Motor Controller Hall Balanced Car Driver Board U5Y
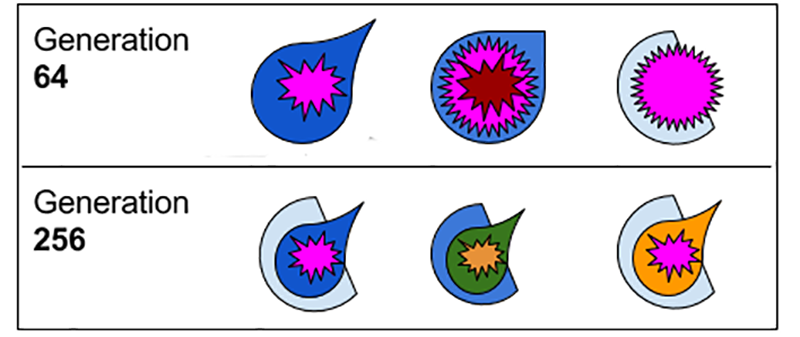
Evolution is a fact of life, it is the defining characteristic of life itself, but that doesn’t mean a stupid robot can’t evolve. For his entry into the Hackaday Pi Zero contest, diemastermonkey is doing just that: evolution for robots built around microcontrollers and a Raspberry Pi.
The project is a physical extension to genetic algorithms. Just like DNA and proteins have no idea what they’re actually doing, microcontrollers don’t either. Instead of randomly switching up base pairs and amino acids, his project makes random connections pins depending on the values of those pins.
The potential of these randomly programmed robots is only as good as the fitness function, and so far he has seen some surprising success. When putting these algorithms into a microcontroller connected to a tilting table mechanism and a PIR sensor, the robot eventually settled on a bit of code that would keep a ball in motion. You can check out the video of this below.
ATMEL is a manufacturer of semiconductors, founded in 1984. Its focus is on system-level solutions built around flash microcontrollers. Its products include microcontrollers (including 8051 derivatives and AT91SAM ARM-based micros), and its own Atmel AVR and AVR32 architectures, radio frequency (RF) devices, EEPROM and Flash memory devices, and a number of application-specific products. Atmel supplies its devices as standard products, ASICs, or ASSPs depending on the requirements of its customers. In some cases it is able to offer system on chip solutions.
Atmel ATMEGA32 microcontroller
Atmel serves a range of application segments including consumer, communications, computer networking, industrial, medical, automotive, aerospace and military. It is an industry leader in secure systems, notably for the smart card market.
The President and CEO of Atmel is George Perlegos. His brother, Gust Perlegos, is Vice President. There are approximately 8,000 employees currently working for ATMEL, and its market strength is continuing to grow rapidly with it’s introduction of new technologies. It is headquartered in San Jose, California.
Atmel owns five semiconductor facilities which are based in:
* Fab5 in Colorado Springs (USA)
* Fab7 in Rousset (France)
* Fab9 in North Tyneside (England)
* A fab in Heilbronn (Germany)
* A fab in Grenoble (France)
PIC is a family of RISC microcontrollers made by Microchip Technology, derived from the PIC1650 originally developed by General Instrument’s Microelectronics Division.
Microchip Technology does not use PIC as an acronym; in fact the brand name is PICmicro. It is generally regarded that PIC stands for Peripheral Interface Controller, although General Instruments’ original acronym for the PIC1650 was “Programmable Intelligent Computer”. The original PIC was built to be used with GI’s new 16-bit CPU, the CP1600. While generally a good CPU, the CP1600 had poor I/O performance, and the 8-bit PIC was developed in 1975 to improve performance of the overall system by offloading I/O tasks from the CPU. The PIC used simple microcode stored in ROM to perform its tasks, and although the term wasn’t used at the time, it is a RISC design that runs one instruction per cycle (4 oscillator cycles).
General Instrument’s PIC1655
In 1985 General Instruments spun off their microelectronics division, and the new ownership cancelled almost everything — which by this time was mostly out-of-date. The PIC, however, was upgraded with EPROM to produce a programmable channel controller, and today a huge variety of PICs are available with various on-board peripherals (serial communication modules, UARTs, motor control kernels, LCD drivers, etc.) and program memory from 512 words to 32k words and more (a “word” is one assembly language instruction, varying from 12, 14 or 16 bits depending on the specific PICmicro family).
Various PIC microcontrollers
Writing Code for PICs
PICs use a RISC instruction set, which varies in length from about 35 instructions for the low-end PICs to about 70 instructions for the high-end PICs. The instruction set includes instructions to perform a variety of operations on the accumulator and a constant or the accumulator and a memory location, as well as for conditionally executing code and jumping/calling other parts of the program and returning from them, and specific hardware features like interrupts and one low-power mode called sleep. Microchip provides a freeware IDE package called MPLAB, that also includes a software simulator as well as an assembler.
Third parties make C and BASIC language compilers for PICs. Microchip also sells compilers for the high-end PICs (“C18” for the 18F series and “C30” for the dsPICs). They also make available for download a “student edition/demo” version of C18 or C30 which disables some optimiser features after a timeout period. Open-source compilers for the C, Pascal, JAL, and for the Forth programming language, PicForth, have also been released.
GPUTILS is an Open Source collection of tools, distributed under the GNU General Public License. GPUTILS includes an assembler and linker and works on Linux, Mac OS X, OS/2 and Microsoft Windows. GPSIM is an Open Source simulator for the PIC microcontrollers featuring hardware modules that simulate specific devices that might be connected to them, like LCDs.
Devices called “programmers” are traditionally used to get program code into the target PIC. Most PICs that Microchip sells nowadays have ICSP (In Circuit Serial Programming) and/or LVP (Low Voltage Programming) capabilities, allowing the PIC to be programmed while it is sitting in the target circuit. ICSP programming is performed using the RB6 and RB7 pins for clock and data, while a high voltage (12V) is present on the Vpp/MCLR pin. Low voltage programming allows for the elimination of the extra voltage rail in the programmer but comes at the cost of an IO pin and can therefore be disabled (once disabled it can only be re-enabled using high voltage programming). There are many programmers for PIC microcontrollers, ranging from the extremely simple designs that rely on the communications software for taking care of all the communication details to complex designs that can verify the device at several supply voltages and can do much of the work in the hardware. Many of these complex programmers use a pre-programmed PIC themselves to send the programming commands to the PIC that is to be programmed.
Many of the higher end flash based PICs can also write to their own program memory. Demo boards are available with a small bootloader factory programmed that can be used to load user programs over an interface such as RS-232 or USB.
There are many programmers/debuggers available directly from Microchip:
PICStart Plus (RS232 serial interface)
Promate II (RS232 serial interface)
MPLAB PM3 (RS232 serial and USB interface)
ICD2 (RS232 serial and USB interface)
PICKit 1 (USB interface)
PICKit 2 (USB interface)
Debugging
MPLAB (which is a free download) includes a software emulator for PICs. However software emulation of a microcontroller will always suffer from limited simulation of the devices interactions with its target circuit.
The MPLAB ICD2 (RS-232 serial and USB interface). Offers fairly cheap (about £100) in circuit debugging. A programming/debug connector (the ICD2 has a RJ12 socket and comes with a cross wired RJ12 lead but there is nothing preventing the use of custom cables to other connector types) is designed into the target circuit. This cheap and simple debugging system comes at a price however, namely limited breakpoint count (1 on older pics 3 on newer PICs), loss of some IO (with the exception of some surface mount 44 pin PICs which have dedicated lines for debugging) and loss of some features of the chip. For small PICs where the loss of IO caused by this method would be unacceptable special headers are made which are fitted with PICs that have extra pins specifically for debugging. Some third party debugging solutions also exist using the on chip facilities provided for the ICD2.
Finally microchip offers two full in circuit emulators. The MPLAB ICE2000 (parallel interface, a USB converter is available) and the newer MPLAB ICE4000 (USB interface). There are also third party emulators from such companies as RF Solutions, who produce the ICEPIC3 system, these are often lower cost solutions.
Word size
The word size of PICs is a source of much confusion. All PICs (except dsPICs and PIC24s) handle data in 8-bit chunks, so they should be called 8-bit microcontrollers. But unlike most CPUs, PICs use Harvard architecture, so the size of an instruction can be different from the size of the data. In fact, different PIC families use different instruction sizes, which makes it a challenge to compare the code size of PICs to other microcontrollers. For example, say a microcontroller has 6144 bytes of program memory. For a 12-bit PIC, this works out to 4096 words (or assembly instructions); for a 16-bit PIC, this is 3072 words.
Modern PICs
The old PROM and EPROM PICs are now gradually replaced by chips with Flash memory. Likewise the original 12-bit instruction set of the PIC1650 and its direct descendants has been superseded by 14-bit and 16-bit instruction sets. Microchip still sells OTP (one-time-programmable, or PROM) and UV-eraseable (EPROM) versions of most of its PICs for legacy support, or volume orders. It should be noted that the Microchip website lists PICs that are not electrically erasable as OTP despite the fact that UV erasable windowed versions of these chips can be ordered.
Features
Current PICs offer a wide range of built-in hardware, such as:
8/16 bit Modified Harvard Architecture CPU cores
Flash and ROM Memory options in 256 byte to 256 kilobyte array sizes
I/O Ports (0 to 5.5 volts Typical)
8/16 Bit Timers
Nanowatt Technology for Power Moding
Synchronous/Asynchronous Serial Peripherals USART, AUSART, EUSARTs
Analog-to-digital converters, 10/12 bit
Voltage Comparators
Capture/Compare/PWM modules
LCD Drivers
MSSP Peripheral for I²C and SPI Communications
Internal EEPROM Memory – up to 1M erase/write cycles durability
Motor Control Peripherals
USB interfacing support
Ethernet controller support
CAN controller support
LIN controller support
IrDA controller support
Integrated analog RF front ends (PIC16F639, and rfPIC)
KEELOQ Rolling code encryption peripheral (encode/decode)
DSP digital signal processing capabilities (dsPIC)
PICs on the Internet
PICs are well-documented on the Internet, mainly for two reasons. First, PICs were commonly used to defeat the security system of popular consumer products (pay-TV, PlayStation), which attracted the attention of crackers. Second, the now obsolete PIC16C84 was the first widely available microcontroller that could easily be re-programmed by hobbyists. There are many forums and lists concerning PIC microcontrollers where the user can post questions and receive free answers.
PIC clones
Every now and then there are companies that offer cheap and/or enhanced PIC versions. Most seem to disappear quite soon. Ubicom (formerly Scenix) seems to avoid this fate and produces the SX, a PIC clone that runs much faster than the original (as of November 2005 Parallax is the exclusive supplier of the SX). OpenCores has a pic16f84 core written in Verilog.
Wireless PICs
The rfPIC microcontroller devices integrate the power of Microchip´s PICmicro devices with UHF wireless communication capabilities for low power RF applications. The devices offer small package outline and low external component count to fit the most space-constrained applications.
dsPICs (Digital Signal PICs)
dsPICs are Microchip’s newest family, which entered mass production in late 2004. They are designed as a PIC with digital signal processing capabilities. These are Microchip’s first inherent 16-bit (data) microcontrollers. They build on the PICs existing strengths by offering hardware MAC (multiply-accumulate), barrel shifting, bit reversal, (16×16)-bit multiplication and other digital signal processing operations.
8/16-bit PIC microcontroller product families
These links take you to product selection matrices at the manufacturer’s site.
8-bit Microcontrollers
PIC10
PIC12
PIC14
PIC16
PIC17
PIC18
16-bit Microcontrollers
PIC24
16-bit Digital Signal Controllers
dsPIC30
dsPIC33F
The F in a name generally indicates the PICmicro uses flash memory and can be erased electronically. A C generally means it can only be erased by exposing the die to ultraviolet light (which is only possible if a windowed package style is used).
PICPrg A fast Linux command line (or ncurses) program, to program any Microchip PIC using the PC parallel port interface. Program/verify PIC data, erase non-protected/protected PIC data or calculate the PIC checksum.